

راهنمای مونتاژ کیت ربات تعقیب خط D2-1 :
برای خرید ربات تعقیب خط“اینجا کلیک کنید “
مرحله ۱ : لیحم کاری سوکت IC و پتانسیومتر و کلید
اولین مرحله ی ساخت ربات تعقیب خط لحیم کاری سوکت آی سی است .
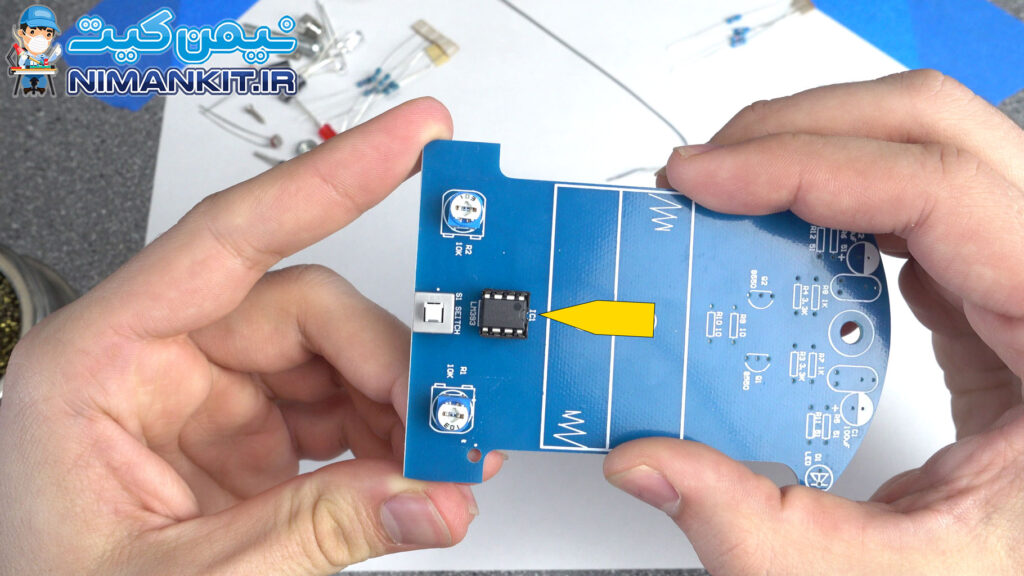
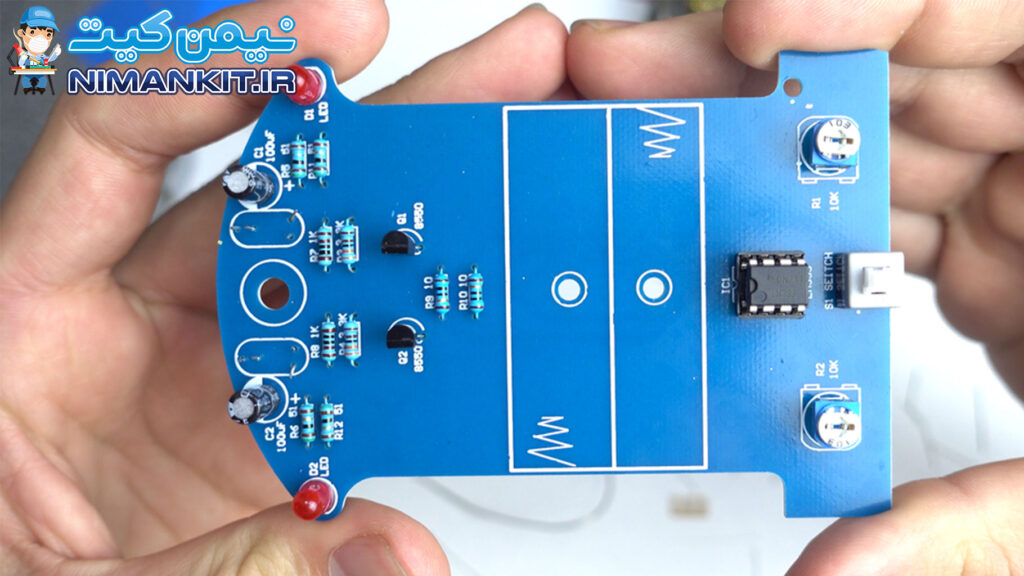
سوکت آی سی را پیدا کنید و آن را در جای مشخصشده “IC1” قرار دهید، همانطور که نشان داده شده است. اطمینان حاصل کنید که سر اشاره شده با نشانگر، با سوراخ مشابه در تصویر همخوانی دارد.
برد را برگردانید، سپس هر یک از پینها را لحیم کاری کنید.
دو پتانسیومتر قابل تنظیم 10K را پیدا کنید و آنها را در جای مشخصشده “R1” و “R2” قرار دهید، همانطور که نشان داده شده است.
برد را برگردانید و آنها را لحیم کاری کنید.
کلید روشن/خاموش را پیدا کنید.
آن را در جای مشخصشده “S1 SEITCH” قرار دهید. (بله، به همین صورت املایی، بر روی برد!)
کلید را لحیم کاری کنید.
حالا که این انتهای برد را لحیم کاری کردهاید، جلو بروید و IC را داخل سوکت قرار دهید. به قسمت گودی روی IC توجه کنید که باید همانطور که نشان داده شده، با فلش در تصویر بر روی برد هماهنگ شود.
مرحله ۲ : لحیم کاری LED ها و خازن ها
بیایید به قسمت جلوی PCB برویم.
دو LED قرمز خود را پیدا کنید.
همانطور که مشخص است، آنها به آن قسمت از برد که با علامت “D1” و “D2” مشخص شده می روند.
اگر به راهنمای روی برد دقت کنید می بینید که علامت LED حالت نیم دایره دارد ، یک طرف از LED نیز صاف است که باید با راهنما مطابقت داشته باشد .
یک برای جلوگیری از افتادن قطعات هنگام لحیم کاری میتوانی از نوار چسب کمک بگیرید .نوار چسب را روی هر LED بچسبانید تا در جای خود ثابت بماند.
پایه های LED را لحیم کنید و مقدار اضافی پایه ها را ببرید .
حالا خازن های 100uF خود را پیدا کنید.
آنها در نقاطی با علامت “C1” و “C2” مشخص شده قرار می گیرند . به خط سفید دروی خازن ها توجه کنید، که باید در همان سمت نیمه سفید راهنمای روی برد باشد.
پس از اینکه آنها را در محل خود قرار دادید، لحیم کاری کنید و مانند LED اضافه پایه هارا ببرید .
مرحله ۳ : لحیم کاری ترانزیستور ها
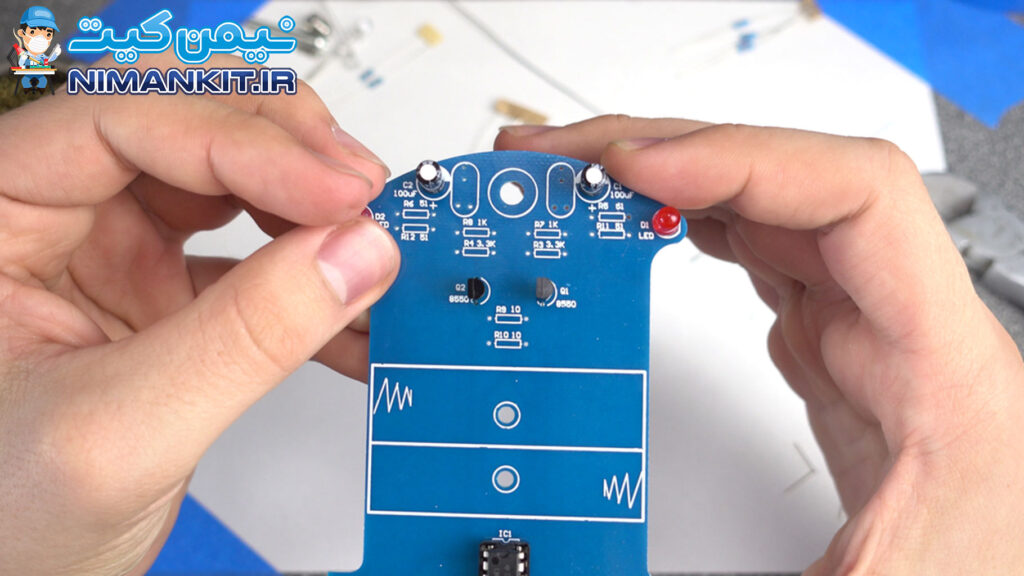
ترانزیستورهای خود را پیدا کنید آنها در نقاطی با علامت “Q1” و “Q2” قرار خواهند گرفت
توجه داشته باشید که ترانزیستور ها شکم دارند ! هنگام لحیم کاری ترانزیستور ها توجه کنید که جهت شکم راهنمای برد و ترانزیستور ها یکی باشد .
ترانزیستورها را در جای خود لحیم کنید.
مرحله ۴ : لحیم کاری مقاومت ها
در گام بعدی مقاومت ها را لحیم کنید . ( مقدار مقاومت ها روی نوار آنها نوشته شده است )
(R5,R6,R11,R12) مقاومت ۵۱ اهم
(R7,R8) مقاومت ۱ کیلواهم
(R9,R10) مقاومت ۱۰ اهم
(R3,R4) مقاومت ۳.۳ کیلو اهم
مرحله پنجم : بستن پیچ تکیه گاه و لحیم کردن فرستنده و گیرنده

در این مرحله ابتدا پیچ تکیه گاه را در محل مورد نظر قرار داده و مهره و مهره سربسته را ببندید .
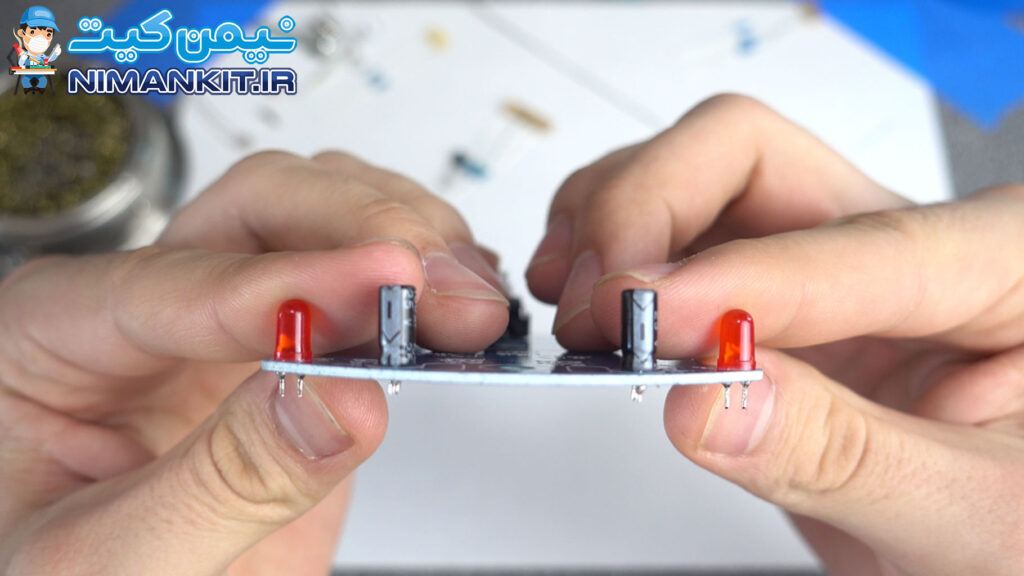
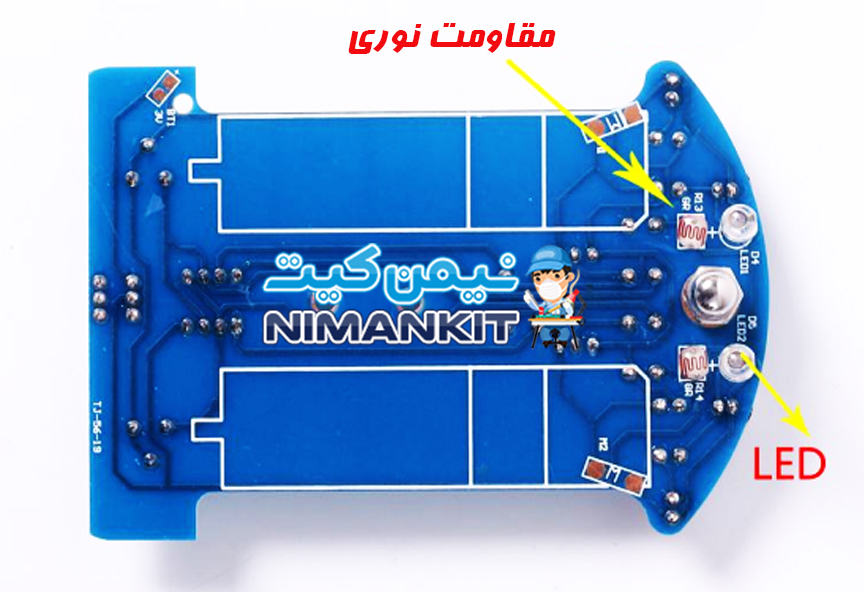
سپس به سراغ LED های شفاف ( که نور قرمز از خود ساطح می کنند ) و LDR یا همان مقاومت نوری می رویم .
توجه داشته باشید که آنها را باید به زیر برد و مانند تصویر بالا لحیم کنیم و ارتفاع آنها مطابق تصویر بالا باشد .
دقت کنید که LED و مقاومت نوری بیش از حد به هم نزدیک یا دور نباشند .
مرحله ۶ : لحیم کردن سیم جا باتری

در کنار پتانسیومترC1 دو سوراخ وجود دارد که محل اتصال جاباتری است .جا باتری را بردارید و سر سیم های آن را به مقدار ۲-۳ میلیمتر لخت کنید ، برای آسانتر شدن لحیم کاری ابتدا به سر سیم جا باتری مقداری لحیم بزنید .
اگر برد را برگردانید و نوشته های راهنمای روی برد را نگاه کنید متوجه +و – خواهید شد ، سیم قرمز به + و سیم سیاه را به – لحیم کنید .
جا باتری را با چسب دو طرفه به برد بچسبانید .
مرحله ۷ : لحیم کاری و نصب موتور
اکنون ما آماده اتصال موتورها به ربات هستیم. این آخرین مرحله لحیم کاری است که باید انجام دهید!
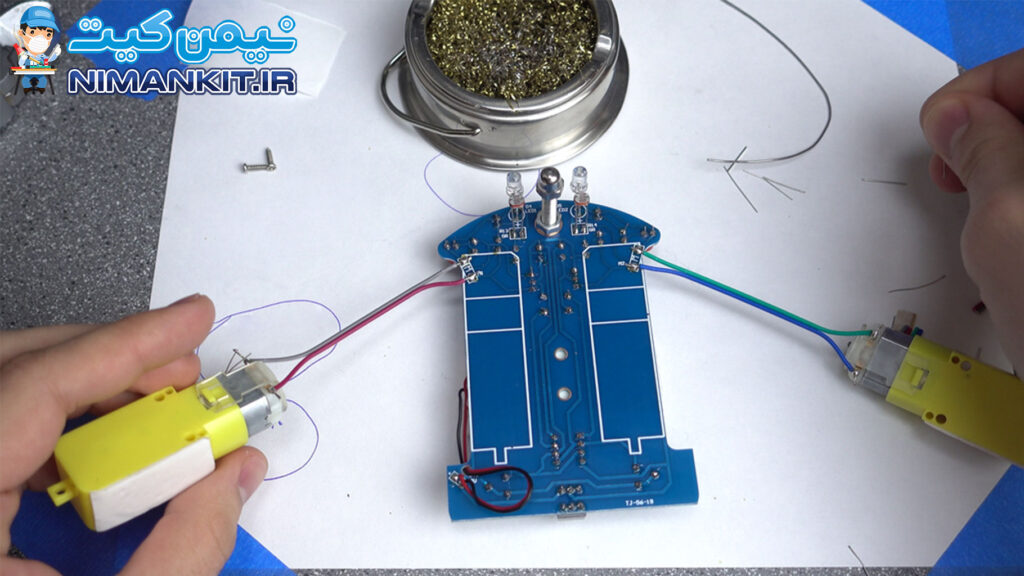
سیم هایی را که درون بسته وجود دارد را بردارید و مانند شکل انتهای هر کدام را داخل زبانه های اتصال فلزی روی موتورها قرار دهید.
سیم ها را به زبانه های اتصال لحیم کنید.
حالا به سر سیم های موتور هم کمی لحیم بزنید و آنها را به قسمتی که با علامت “M1” و “M2” مشخص شده لحیم کنید .
توجه داشته باشید که اتصال صحیح سیم های موتور مانند تصویر باشد ، درحالی که شف و محور موتور رو به پایین است .
لحیم کاری که تمام شد موتور ها را با چسب دو طرفه به زیر برد بچسبانید .
مرحله ۸ : بستن چرخ ها
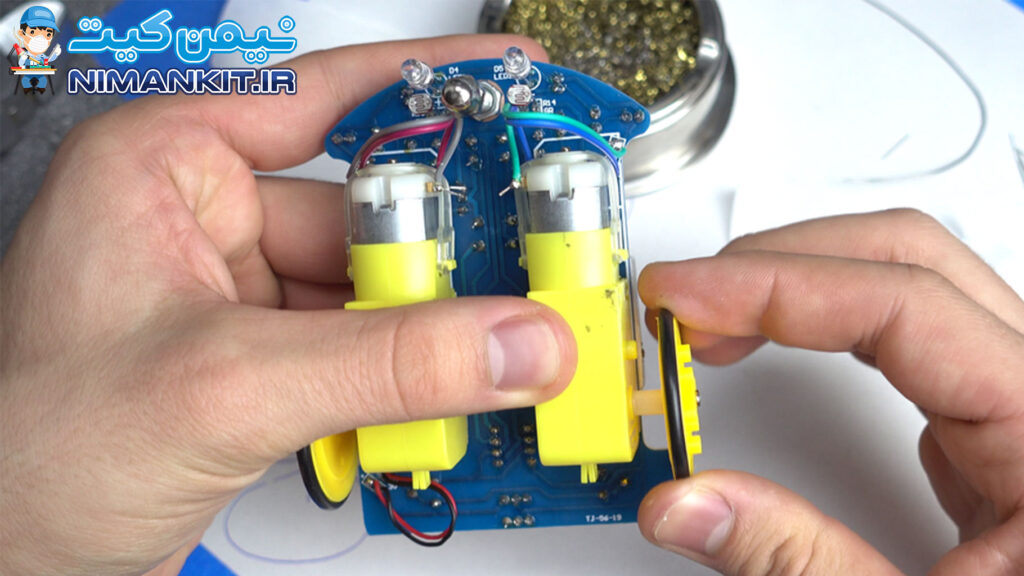
پس از آنکه موتور ها را به برد چسباندید ، چرخ برد را مانند تصویر روی محور موتور قرار داده و با پیچ سفت کنید .
آخرین مرحله : تنظیم ربات تعقیب خط

ساخت ربات شما تمام شده است! دو باتری قلمی داخل آن قرار دهید و ربات را روشن کنید .
اگر فوراً خط را دنبال نکرد، نترسید! پتانسیومترهای پشتی را به خاطر دارید؟ آنها حساسیت سنسور را تنظیم می کنند.
برای تنظیم موتور ابتدا فرستنده و گیرنده (LED قرمز و مقاومت نوری زیر ربات ) را روی قسمت خط سیاه صفحه تست ربات قرار دهید ، باید در این حالت هر دو موتور خاموش باشند ، اگر روشن بود پتانسیومتر ها را بچرخانید تا خاموش شوند .
سپس سنسور رو روی صفه سفید بزارید ، باید هر دو موتور روشن شوند ، اگر روشن نشد پتانسیومتر ها را بچرخوانید تا روشن شود .
حالا ربات را روی صفحه آزمایش قرار دهید تا شروع به حرکت روی خط سیاه کند . ادامه دهید تا ربات یک خط را به خوبی دنبال کند.
یک نکته دیگر:
میتوانید از چسب برق مشکی برای ساخت صفحه حرکت استفاده کنید .
با خطوط درهم و همپوشانی آزمایش کنید تا ببینید ربات چگونه پاسخ میدهد.